



 Jorge Dengra Galán
Jorge Dengra Galán  06/04/2021
06/04/2021 
 Allá por los años 70 se empezó a implementar lo que se conoce como Navegación de Área RNAV. Hasta ese momento la navegación convencional continental se basaba en radioestaciones terrestres fijas que presentaban serios inconvenientes.
Allá por los años 70 se empezó a implementar lo que se conoce como Navegación de Área RNAV. Hasta ese momento la navegación convencional continental se basaba en radioestaciones terrestres fijas que presentaban serios inconvenientes.
No solo era el costoso mantenimiento de las mismas sino, sobre todo, la falta de flexibilidad operacional. Se requerían áreas de protección y separaciones entre tráficos muy amplias para mitigar su imprecisión inherente. Esto provocaría bajos volúmenes de tráfico y saturación de rutas.
Con el crecimiento exponencial del número de vuelos en aquella época, esto empezaba a ser inaceptable.
Se necesitaba definir un nuevo espacio de operaciones que permitiera la navegación entre puntos no necesariamente asociados a estaciones terrestres.
Justo por aquel entonces se empezaban a instalar los primeros INS (Inertial Navigation Systems), a la vez que aparecían los novedosos sistemas de gestión del vuelo FMS y sus bases de datos asociadas, lo que permitía una navegación más precisa.
Navegación de área RNAV
Así nació la navegación de área RNAV, definida como la navegación entre puntos (waypoints) determinados tanto por señales radioeléctricas terrestres (VOR/DME, DME/DME, Loran C) como por señales GPS o por los equipos de navegación autónomos INS.
A principios de los 90 se implementó en Europa lo que se conoce como navegación de área básica B-RNAV, o RNP-5 en USA (Required Navigation Performance).
Este tipo de navegación se hizo obligatoria a partir de 1998 y constituyó el estándar básico inicial de la navegación continental. Requiere de un mínimo de precisión de +/-5 NM durante el 95% del tiempo de vuelo.
Se adoptó esta precisión mínima porque se consideró que de esta forma el error de navegación sería similar al que se obtendría si voláramos en una ruta tradicional ATS con referencias exclusivas VOR/DME, cuyas estaciones estuvieran separadas menos de 100 NM.
Para conseguir este objetivo, en aquel entonces muy ambicioso, hubo que definir nuevos estándares para los FMS y sus bases de datos, crear nuevos procedimientos operativos y referenciar todo a unas coordenadas geodésicas comunes basadas en el WGS 84 (World Geodetic System 84)
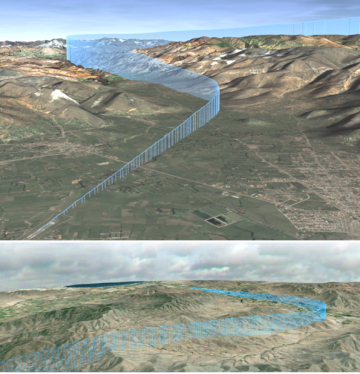
Rutas (no aproximaciones) con cobertura RNAV/RNP
Con el paso del tiempo se fueron implementando nuevos requisitos de RNP en función de si la ruta tenía cobertura o no de radioayudas terrestres. Para aquellas que sí tenían cobertura se definieron las RNP-5, RNP-4 y RNP-2 para el espacio doméstico USA. RNAV5 (RNP5 en la nomenclatura actual) para el territorio europeo, donde el número indica la precisión requerida en millas. Hoy en días ambos espacios requieren RNP-1.
Para rutas oceánicas o áreas remotas sin cobertura se crearon las RNP-10 y RNP-12, aunque en la actualidad en determinados espacios aéreos (NATS HLA) se exigen precisiones mejoradas RNP-4 debido a la alta afluencia de tráfico aéreo en esas rutas.
Estos requisitos de navegación estaban muy bien para la ruta, pero eran excesivamente limitados para la fase de aproximación. Y de nada valía que se pudiera navegar en ruta de punto a punto, para luego llegar al área terminal del aeropuerto y volver a tener que usar señales radioeléctricas terrestres.
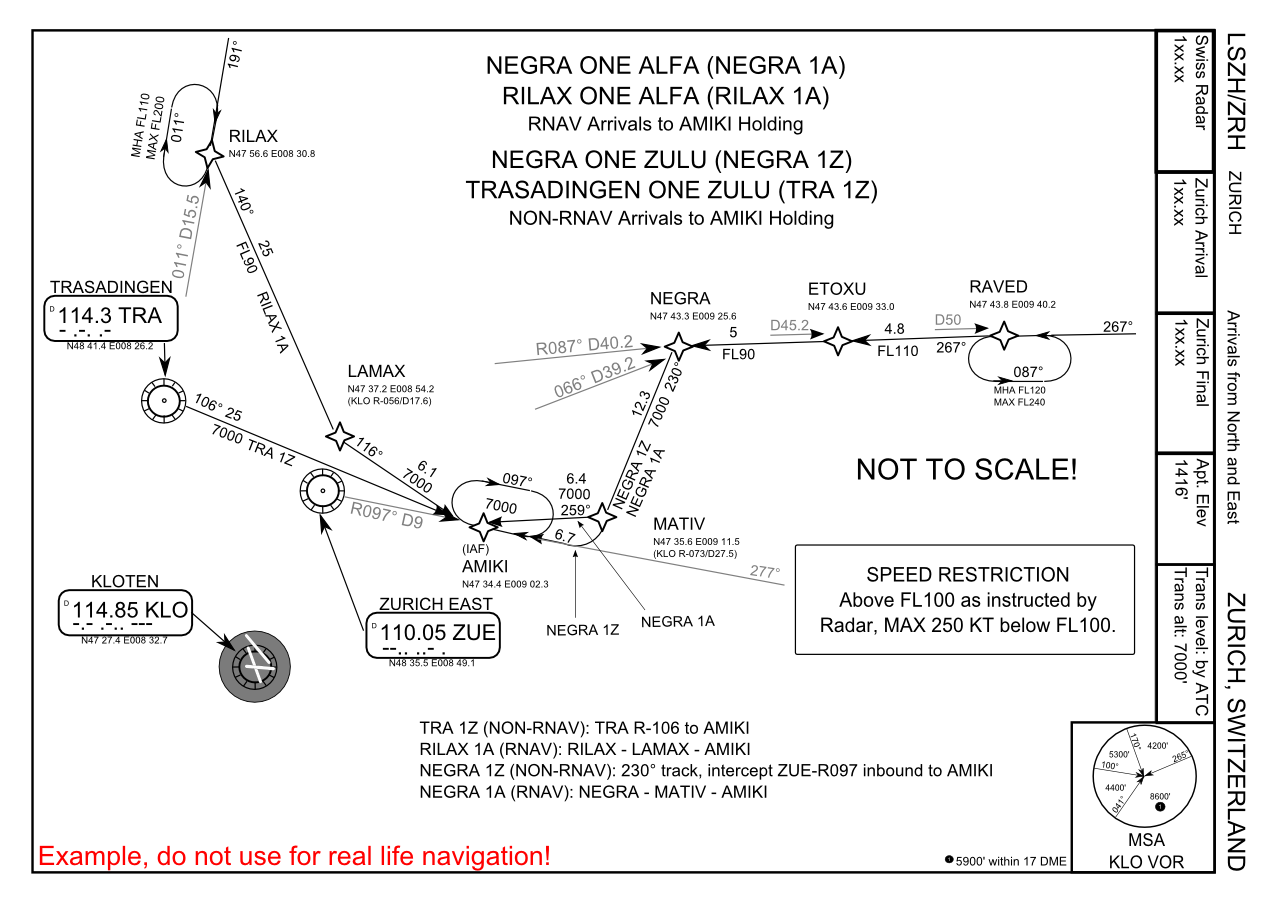
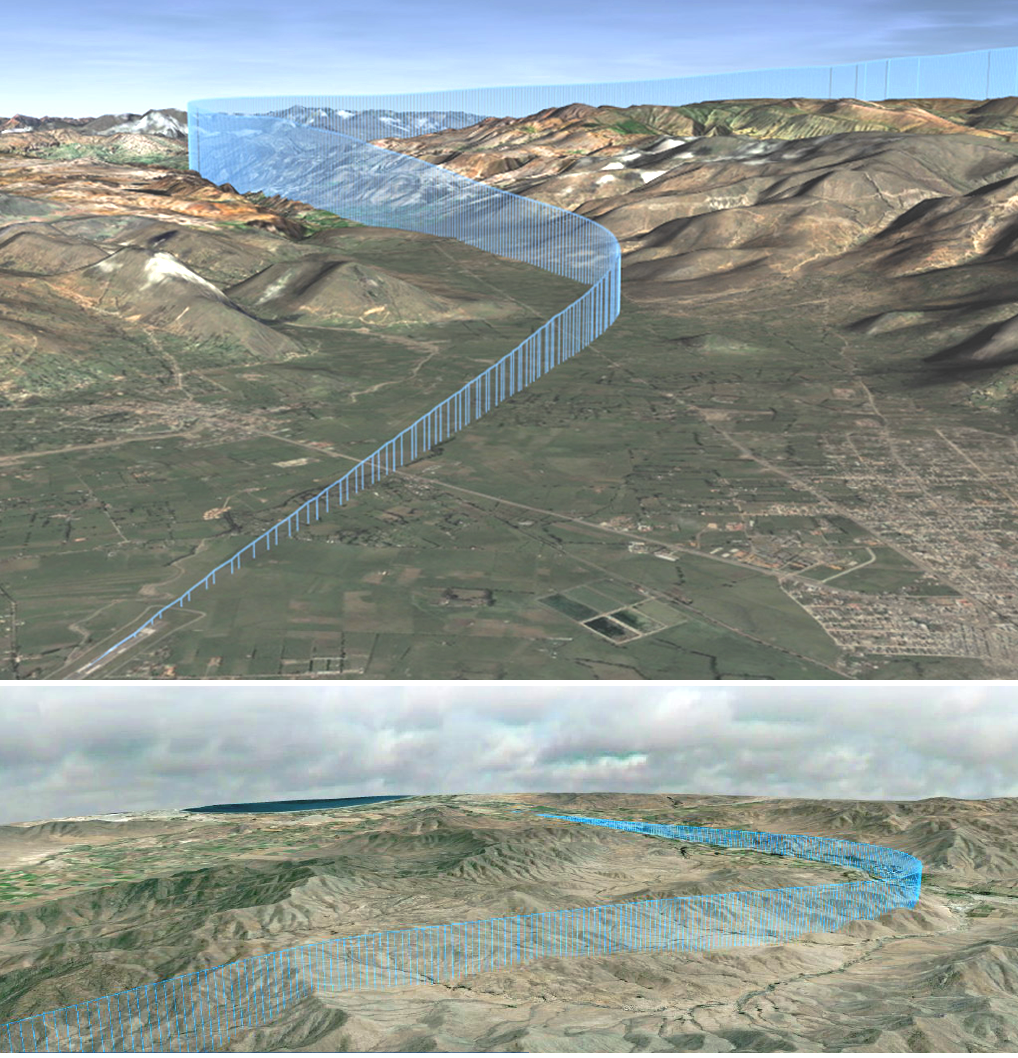
Ejemplo de STAR RNAV y NO RNAV Jepessen
Aproximaciones RNAV SID y STAR
Para esta fase se definió un nuevo requisito de navegación de area de Precisión P-RNAV (o RNP1 de acuerdo a la terminología americana). Básicamente requiere una precisión de +/- 1 NM en el área d aproximación.
En llegadas, desde el inicio de la STAR hasta el FAF, o -en salidas- desde el despegue hasta el punto final de la SID, y uso de referencias barométricas para la navegación vertical.
Son las RNAV SID y RNAV STAR que todos los pilotos conocemos.
Artículo: Aproximaciones RNAV y RNP: ¿Qué es PBN? Performance Based Navigation
